Stejnosměrné motory se v domácnostech vyskytují jen zřídka. Ale vždy stojí ve všech dětských hračkách, které pracují z baterií, které jdou, běh, jízda, létat, atd. DC motory jsou instalovány v automobilech: ve ventilátorech a různých pohonech. Jsou téměř vždy používány v elektrické dopravě a jsou méně běžné ve výrobě.
Výhody DPT ve srovnání s asynchronními motory:
- Dobře regulované.
- Vynikající výchozí vlastnosti.
- Frekvence otáčení může být vyšší než 3000 ot /min.
Nevýhody DTP:
Dále Ise bude snažit stručně a vv jednom článku pokrýt schémata, principy činnosti, regulace a zpětného chodu stejnosměrných motorů.
- Princip činnosti elektromotoru stejnosměrného proudu
- Základní obvody elektromotoru stejnosměrného proudu
- Obrácení stejnosměrných motorů
- Nastavení otáčení motorů stejnosměrného proudu
Princip činnosti elektromotoru stejnosměrného proudu
Motor je podobný synchronním střídavým proudovým motorům. Nebudu opakovat, pokud nevíte, pak se podívejte do tohoto článku.
Jakýkoli moderní elektromotorfunguje na základě zákona magnetické indukce Faradayova a "Pravidla levé ruky".  Pokud je vinutí kotvy připojeno ke dnu vinutíelektrický proud v jednom směru a na horní - v opačném směru - se začne otáčet. Podle pravidla levého ramene budou vodiče, uzavřené v drážkách kotvy, vytlačovat magnetické pole vinutí tělesa DPT nebo statoru.
Pokud je vinutí kotvy připojeno ke dnu vinutíelektrický proud v jednom směru a na horní - v opačném směru - se začne otáčet. Podle pravidla levého ramene budou vodiče, uzavřené v drážkách kotvy, vytlačovat magnetické pole vinutí tělesa DPT nebo statoru.
Spodní část bude , aby se vytlačila doprava, a horní doleva, takže se kotva začne otáčet, dokud se vymění místa kotvy. Pro vytvoření souvislého otáčení je nutné neustále měnit polaritu navíjení kotvy v místech. Co se týká kolektoru, který při otáčení dosedá na navíjecí kotvy.  Napětí ze zdroje proudu se přivádí do kolektoru dvojicí lisovaných grafitových kartáčů.
Napětí ze zdroje proudu se přivádí do kolektoru dvojicí lisovaných grafitových kartáčů.
Základní obvody elektromotoru stejnosměrného proudu
Pokud jsou motoryse střídavým proudem poměrně jednoduché , pak je DPT složitější. Musíte znát značku motoru, a pak na internetu, dozvědět se o jeho schéma začlenění.
Nejčastějiu středních a výkonných motorůstejnosměrného proudu jsou v svorkovnici, oddělené závěry od kotvy a od vinutí excitace (IV). Kotva je zpravidla dodávána s plným napětím napájecího zdroje a na vinutí excitačně regulovaného proudu reostatem nebo střídavým napětím. Z hodnoty proudu IV a bude záviset na otocích DPT. Čím vyšší je, tím rychlejší je rychlost otáčení.
V závislosti na způsobu připojení kotvy a palubního ovladačepřicházejí elektromotory s nezávislým budením ze samostatného zdroje proudu a se samočinným budením, které může být paralelní, sekvenční a smíšené.
Ve výrobě jsou použity nezávislé IV excitační motory, které se připojují k samostatnému zdroji z kotvy napájecího zdroje. 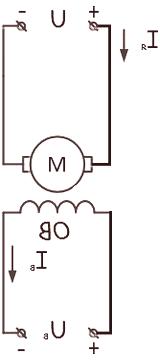 Mezi budícím vinutím a kotvou není elektrické spojení.
Mezi budícím vinutím a kotvou není elektrické spojení.
Systém propojení s paralelní excitacíje v podstatě podobný systému nezávislého buzení IP. Jediný rozdíl spočívá v tom, že není třeba používat samostatný zdroj energie. 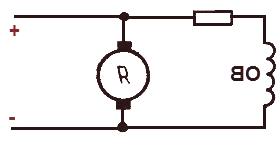 Motory s oběma těmito obvody mají stejné tuhé vlastnosti, takže se používají ve strojích, ventilátorech atd.
Motory s oběma těmito obvody mají stejné tuhé vlastnosti, takže se používají ve strojích, ventilátorech atd.
Trvale poháněné motoryse používají, když je vyžadován velký rozběhový proud, což je měkká charakteristika. Používají se tramvaje, trolejbusy a elektrické lokomotivy. V tomto schématu jsou vinutí budícího a kotvícího členu zapojeny do série. 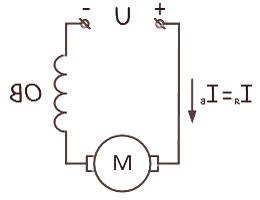 Při použití napětí budou proudy v obou vinutích stejné. Hlavní nevýhodou je, že když je zatížení na hřídeli sníženo na méně než 25% jmenovitého, dochází k prudkému nárůstu rychlosti otáčení a dosažení nebezpečných hodnot pro DPT. Pro bezporuchový provoz je tedy nutné konstantní zatížení hřídele.
Při použití napětí budou proudy v obou vinutích stejné. Hlavní nevýhodou je, že když je zatížení na hřídeli sníženo na méně než 25% jmenovitého, dochází k prudkému nárůstu rychlosti otáčení a dosažení nebezpečných hodnot pro DPT. Pro bezporuchový provoz je tedy nutné konstantní zatížení hřídele.
Někdyse používají smíšené excitační PDT , ve kterých je jedno vinutí IP postupně připojeno k kotevnímu řetězci a druhé paralelní. 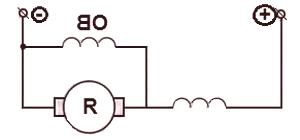 V životě se vyskytuje vzácně.
V životě se vyskytuje vzácně.
Obrácení stejnosměrných motorů
Pro změnu směru otáčeníDPT se sekvenčním buzení by mělo změnit směr proudu v IP nebo vinutí kotvy. V praxi se jedná o změnupolarita: změníme plus se zápornými místy. Pokud se současně změní polarita v kruzích buzení a kotev, pak se směr otáčení nezmění. Obdobně je obrácen také u motorů, které pracují na střídavém proudu.
Obrácení DPT s paralelním nebo smíšeným buzeníse nejlépe provádí změnou směru elektrického proudu ve vinutí kotvy. Když se roztržení rozruší, EMF dosáhne nebezpečných hodnot a případné poruchy izolace vodičů.
Nastavení otáčení motorů stejnosměrného proudu
DPT se sekvenční excitacíje jednodušší regulovat proměnný odpor v kotevním řetězci. Snížení počtu otáček můžete řídit pouze v poměru 2: 1 nebo 3: 1. V tomto případě dochází k velkým ztrátám v regulačním reostatu (registr R). Tato metoda se používá v jeřábech a elektrických vozících, které mají časté přestávky v provozu. 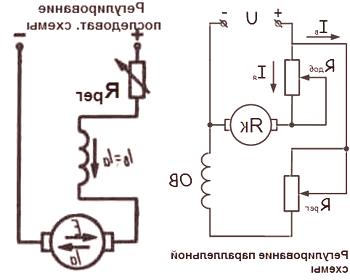 V ostatních případech se používá rychlost otáčení od jmenovité hodnoty pomocí reostatu v kruhovém vinutí excitace, jak je znázorněno na obrázku vpravo.
V ostatních případech se používá rychlost otáčení od jmenovité hodnoty pomocí reostatu v kruhovém vinutí excitace, jak je znázorněno na obrázku vpravo.
Paralelní excitace PDTmůže být také nastavena sníženou rychlostí pomocí odporu kotevního řetězu, ale ne více než 50% hodnocení částic. Odpor bude opět zahříván v důsledku ztráty elektrické energie v něm.
Zvýšení stejné rychlosti maximálně čtyřikrátumožňuje reostat v kruhu IV. Nejjednodušší a nejběžnější způsob nastavení rychlosti otáčení.
V praxi jsou moderní elektromotory vzhledem ke svým nedostatkům a omezenému rozsahu vybaveny metodami řízenípoužívána jen zřídka. Používají se různá schémata elektronického řízení.